Wireless Network Localization and Navigation
Research summary
Location-awareness plays a crucial role in many wireless network applications, such as localization services in next generation cellular networks, search-and-rescue operations, logistics, and blue force tracking in battlefields. The global positioning system (GPS) is the most important technology to provide location-awareness around the globe through a constellation of 24 satellites. However, the effectiveness of GPS is limited in harsh environments, such as in buildings, in urban canyons, under tree canopies, and in caves, due to the inability of GPS signals to penetrate most obstacles. Hence, new localization techniques are required to meet the increasing need for accurate localization in such harsh environments.
Our research interests revolve around following directions:
Theoretical framework for cooperative relative localization
Beamspace direct localization
Tensor-based multipath estimation
Network localization and synchronization using full-duplex radios
Joint active and passive localization framework
Localization techniques based on polarization sensitive array
Bluetooth indoor localization algorithm design
Localizability analysis of large-scale networks
5G positioning system based on SRS signal
Representative research works
 |
Multiple target tracking and information fusion: This work introduces a “tracking with localization” framework under time-varying NLoS environments. Message passing on a factor graph drives bidirectional, recursive information exchange between measurements across sensors and targets with their extended states, yielding robust joint association and tracking in the presence of multipath ambiguity.
|
 |
Joint target localization and data detection in bistatic ISAC networks: We first conduct comparative analyses for traditional sensing, monostatic, and bistatic ISAC. Building on these insights, we propose JTD schemes to exploit mutual benefits for target localization and communication in bistatic ISAC networks, where the detected data symbols are harnessed to improve target localization accuracy.
|
 |
Relative localization: A theoretical analysis framework in terms of the constraint CRLB of EFIM is derived, and the geometry merging and geometry transforming algorithms for relative localization are designed. We further analyze the characteristics of resource allocation for relative localization, and design a corresponding resource allocation algorithm.
|
 |
Beamspace direct localization: We prove that the high-dimensional array signal can be represented in a low-dimensional beamspace without information loss and further propose a robust beamspace design strategy.
|
 |
Tensor-based multipath estimation: We explore the inherent structure of wireless measurements and leverage the uniqueness of tensor factorization. By formulating the localization problem as a low-rank tensor decomposition problem, we deliver accurate multipath estimation with low computational complexity by removing the need for data association.
|
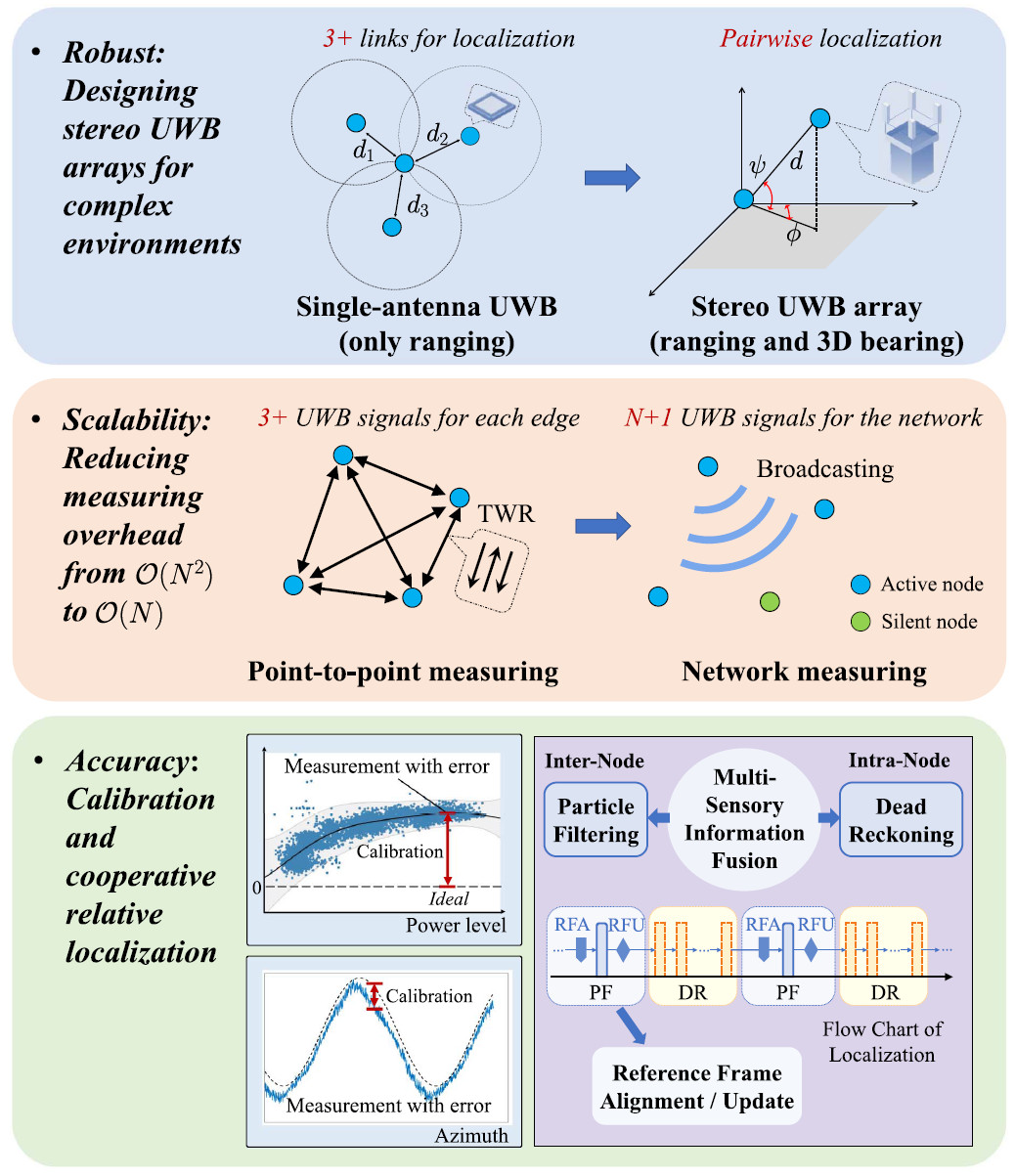 |
Robust and Scalable Multi-Robot Localization: We design a novel UWB sensor for 3-D pairwise localization, enabling robust, scalable, and accurate position awareness for multi-robot systems. After calibrating intrinsic UWB errors from hardware deviations and propagation effects for precise distance and direction estimates, we perform distributed relative localization through inter- and intra-node cooperation by integrating UWB and IMU data. To enable swarm-scale operation, we implement the signal-multiplexing network ranging protocol to maximize update rates and network capacity. Experimental results demonstrate centimeter-level localization accuracy at high update rates.
|
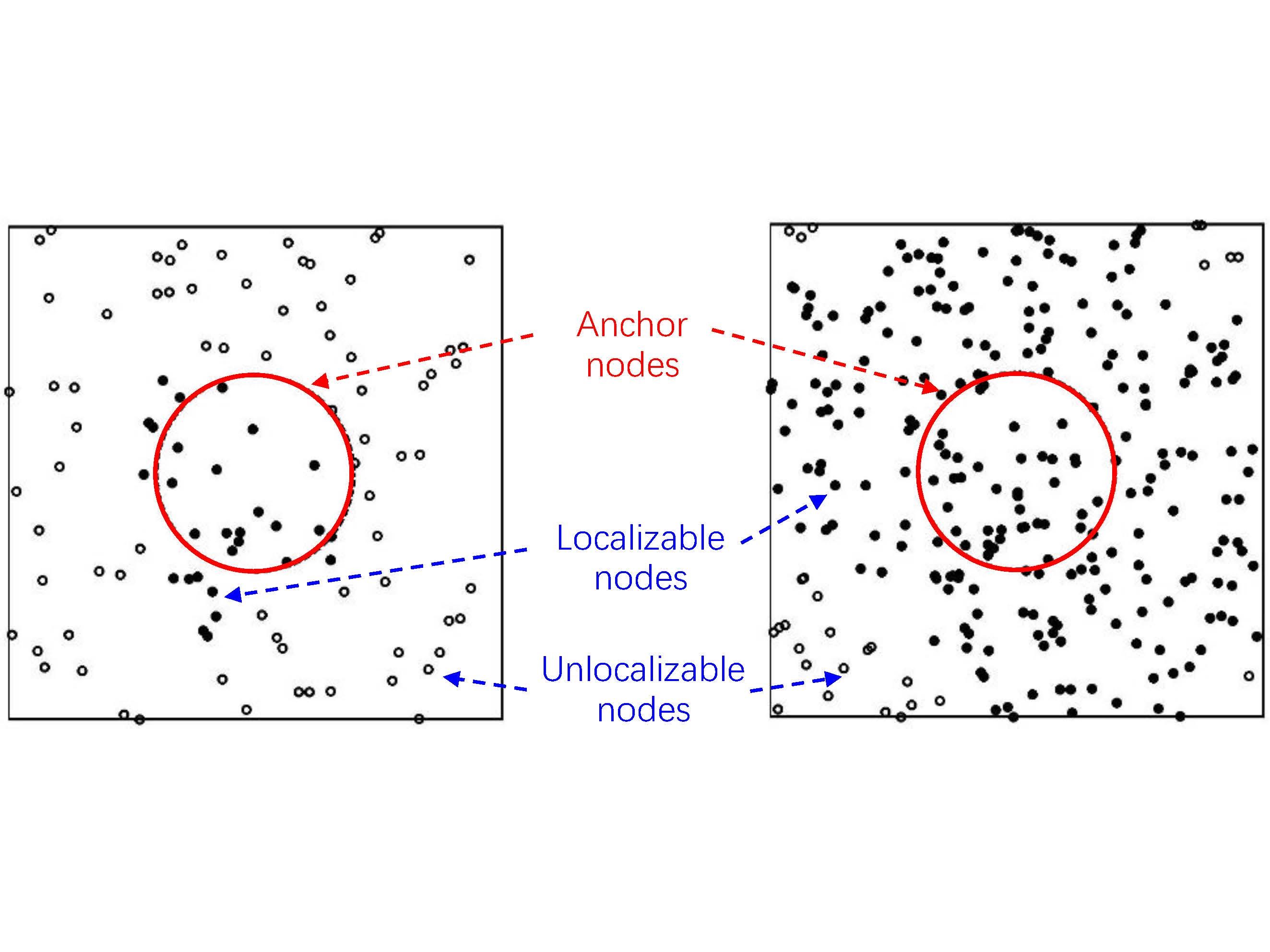 |
We introduce the Percolation Theory in the cooperative network localization problem, prove the existence of the critical node intensity for the localizability of large-scale network.
|
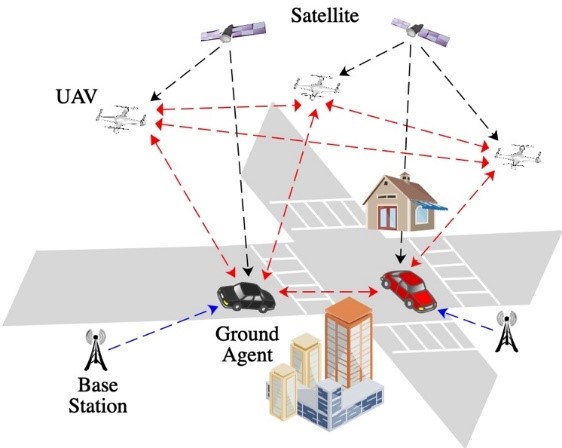 |
We propose a 5G cooperative localization scheme and a distributed cooperative localization algorithm based on maximum likelihood principle. Next, the proposed scheme and algorithm are implemented and simulated by using MATLAB. The superiority of the proposed scheme is verified by comparing with the theoretical limit of positioning error. Finally, we explore the factors affecting the stability of the cooperative localization technology in 5G vehicle networks, and provide ideas for the future research of localization scheme in vehicle networks.
|
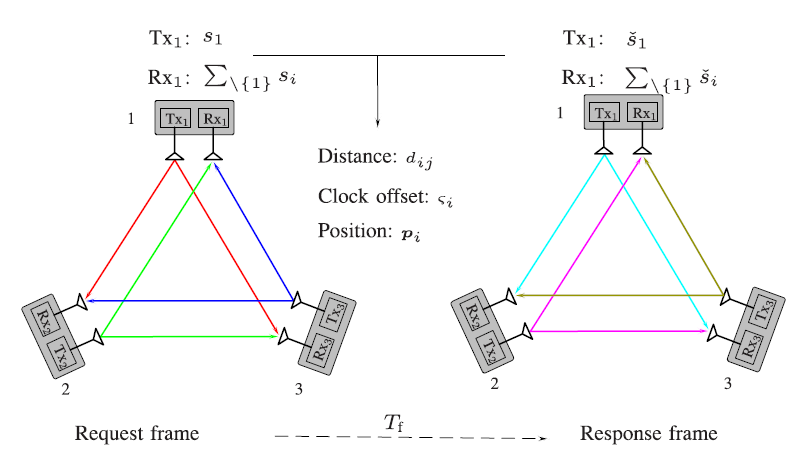 |
Network localization and synchronization using full-duplex radios: We propose NLS schemes using full-duplex radios, where internode distances and clock offsets can be estimated through only two frames of transmission.
|