Localization System Demos and Machine Learning
Research summary
Radio frequency (RF) signals are widely used for indoor localization, such as Bluetooth, Wi-Fi, and radio-frequency identification (RFID)-based localization systems. However, it is challenging for these RF technologies to achieve sub-meter level accuracy and robust localization. The ultra-wideband (UWB) signal can enable high-accuracy localization considering its following unique advantages: sub-nanosecond-level time stamps, strong resistance to MPCs, and high throughput and transfer rate.
We are focusing on the following research directions:
NLOS error mitigation based on self-training learning in RF environments
Ultra-wideband array localization system using wrapped PDoA
Single-anchor localization system based on ultra-wide bandwidth signals
UWB multipath component identification and SLAM
Machine learning algorithm on NLOS error mitigation
Representative works
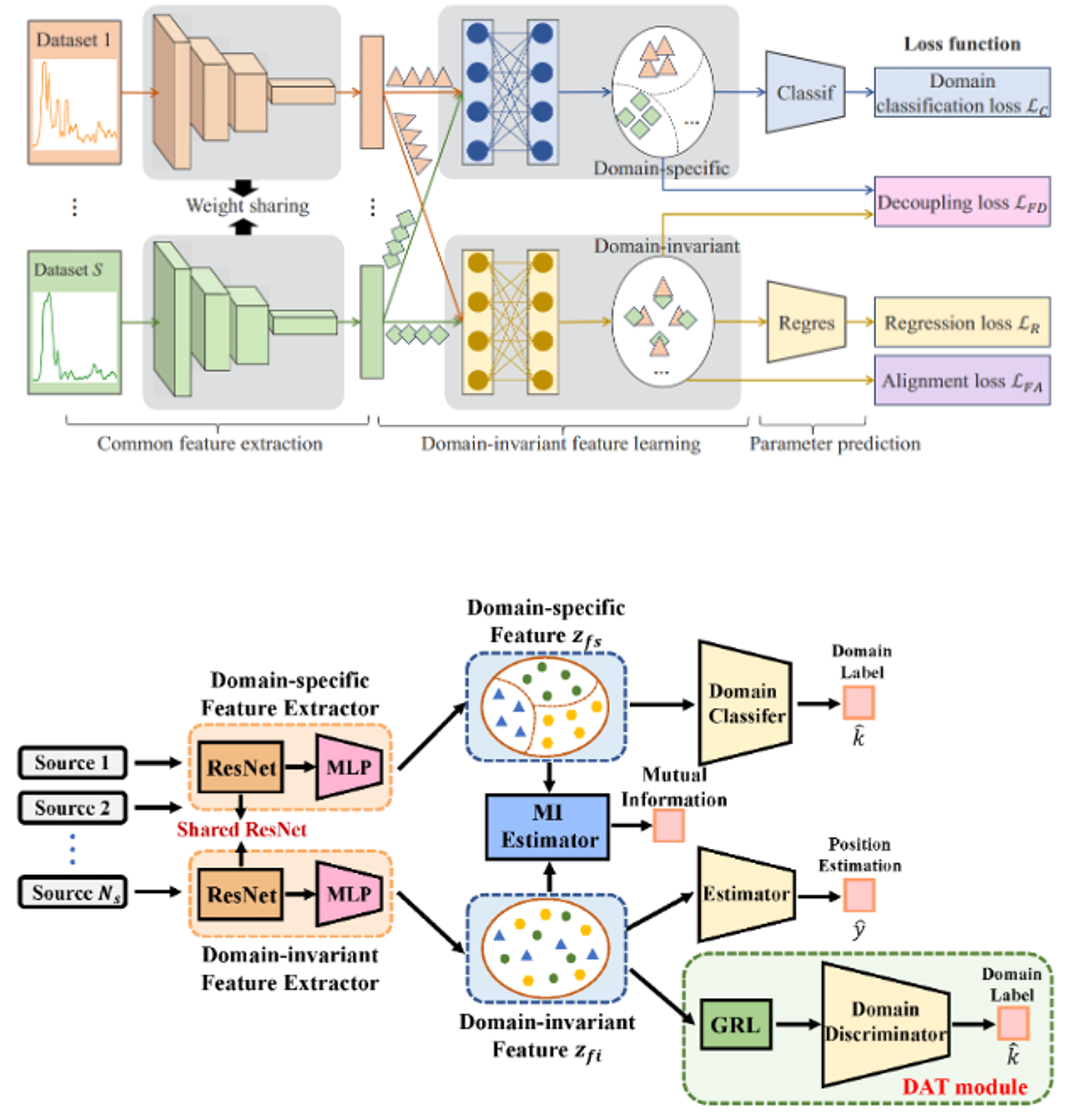 |
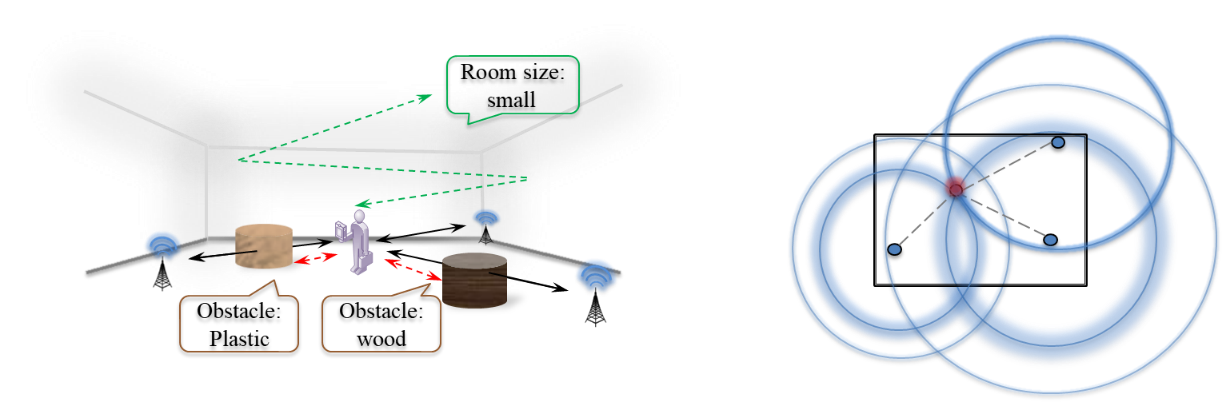
Robust Cross-Scenario Indoor Localization: We propose a generalization framework for indoor localization via feature disentanglement, enabling accurate and efficient ranging and angle error mitigation in unseen environments. After extracting fine-grained domain-invariant features by minimizing cross-domain distribution discrepancies and decoupling domain-specific attributes, we achieve reliable localization without additional data collection or online training. Experimental results demonstrate significant improvements in distance and angle estimation accuracy, respectively, across diverse scenarios with varying obstacles.
|
 |
We develop a single-anchor localization system that achieves 3D high-accuracy localization using time and wrapped phase measurements of UWB signals and achieve decimeter-level localization accuracy in outdoor and indoor environments.
|
 |
We propose a self-training learning scheme for RF environment, and design a multi-sensory information fusion localization system based on inertial sensors, map and UWB. The NLOS ranging error is reduced by more than 75% and results in 90th percentile of final localization error achieving 0.5m in a complex indoor environment.
|
 |
We establish a data-driven wireless localization and sensing framework with deep inference techniques for complicated inference problems, which can theoretically leverage both model-driven and data-driven knowledge of the wireless system and efficiently exploit both positional and situational awareness of agents from raw sensing measurements in harsh environments.
|
 |
We propose a passive anchor assisted localization (PAAL) scheme, where the active anchor obtains TOA and AOA measurements to the agent while the passive anchors capture the signals from the active anchor and agent. The proposed method fully exploits the time-difference-of-arrival (TDOA) information from the measurements at the passive anchors to complement single-anchor joint TOA and AOA localization.
|
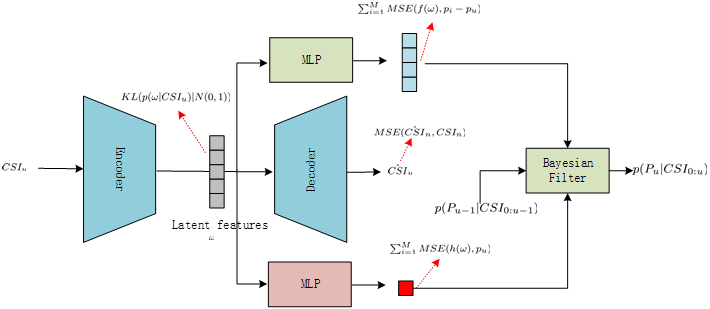 |
We propose a multipath assisted perception and localization algorithm based machine learning. The proposed algorithm utilizes machine learning to achieve robust multipath parameter estimation, and combines with an unsupervised Bayesian filter network to implement a multipath-assisted SLAM algorithm. The proposed algorithm exploits the potential of machine learning and environmental perception
|